LA JOLLA, California (Reuters) — All hands are on deck at this lab at the University of California San Diego, where researcher Michael Tolley’s team are working on a human-like robotic gripper.
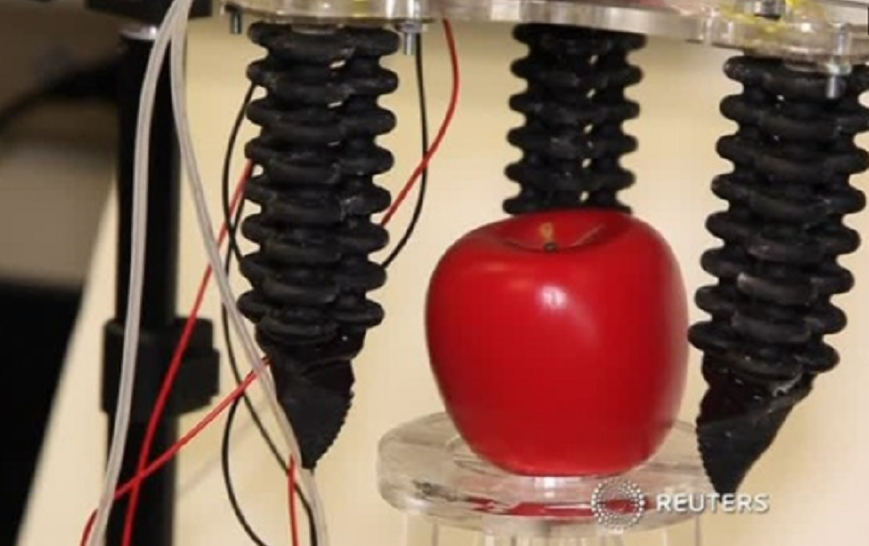
Its three fingers are made of three flexible pneumatic chambers that move when air pressure is applied, allowing each digit to manipulate the object it’s holding.
“These fingers are unique in that they can bend in any direction so we have enough degrees of freedom to really replicate the different sorts of grasps and interactions that you see with, that humans do with objects,” University of California San Diego (UCSD) Jacobs School of Engineering, Professor Michael Tolley, said.
Each free-moving finger is covered with a smart silicone skin embedded with sensors made of conducting carbon nanotubes, which mimic human skin with nerve endings.
It allows the gripper to record and detect objects, similar to how humans reach into their pocket and feel for keys or coins.
The gripper can also carry out specific tasks.
“We wanted to emphasize with this gripper that you could handle delicate objects like a light bulb and apply the torques necessary to screw that in or unscrew it,” Tolley, added.
The team thinks the technology could be useful in manufacturing, but hopes it could also get a grasp on other tasks with the help of artificial intelligence and machine learning.